Home
Die Inhalte dieser Seiten sind nicht statisch, da sie nach Bedarf – und damit oft sehr kurzfristig – modifiziert werden.
Beachten Sie bitte, dass diese Seiten rein privat erstellt und betrieben werden und nicht von meiner ehemaligen Schule der Gewerblich-Technischen Schule Offenburg administriert werden. Ich bin inzwischen pensioniert, pflege die Seite aber hin und wieder mal.
Diese Webseite ist gedacht für Auszubildende, Ausbilder und Lehrer im Berufsfeld „Elektroniker-Geräte-Systeme“. Alle an Elektronik interessierte können auch profitieren.
Die Strukturierung der Inhalte erfolgt in Anlehnung an den gültigen Lehrplan. Dieser Lehrplan ist in 13 Lernfelder gegliedert.
1. Ausbildungsjahr: Lernfelder 1 bis 4
2. Ausbildungsjahr: Lernfelder 5 bis 8
3. + 4 Ausbildungsjahr: Lernfelder 9 bis 13
Meine Unterrichtsinhalte finden Sie in dem Hauptmenue Lernfelder
Themen der Seite:
– Elektrotechnik Grundlagen,
– Installationstechnik Grundlagen,
– Digitaltechnik, auch mit programmierbarer Logik,
– Steuerungstechnik, Automatiserungstechnik,
– Analogtechnik mit Transistoren, OPs und analoge Sensoren
– Mikrocontrollertechnik 8051er, ARDUINO, ARM, Regelungstechnik,
– Antriebstechnik mit Gleichstrom-, Schritt- und Drehstrommotoren
– Simulationen und Visualisierungen mit WINFACT, Profilab, LabVIEW, Multisim; Tinkercad
– Busse und Schnittstellen wie RS232, IIC, SPI, Ethernet,
– Aufgaben und Lösungen aus und für den Unterricht an der Beruflichen Schule.
Das sind weitere Seiten von mir
Elektronik im Unterricht
Elektronik
Energie und E-Autos
Viel Spaß und Erfolg beim stöbern … oder beim gezielten Arbeiten mit den Unterlagen.
Gerhard Neumaier
HIER NOCH EIN PAAR ZITATE:
„Wie die Welt von morgen aussehen wird, hängt in großem Maß von der Einbildungskraft jener ab, die gerade jetzt lesen lernen.“
Astrid Lindgren
Lassen Sie uns alles daransetzen, dass wir der nächsten Generation, den Kindern von heute, eine Welt hinterlassen, die ihnen nicht nur den nötigen Lebensraum bietet, sondern auch die Umwelt, die das Leben erlaubt und lebenswert macht.
Richard von Weizsäcker (*1920), dt. Politiker (CDU), 1984-94 Bundespräsident
Ein paar Bilder aus dem Bereich der Ausbildung:
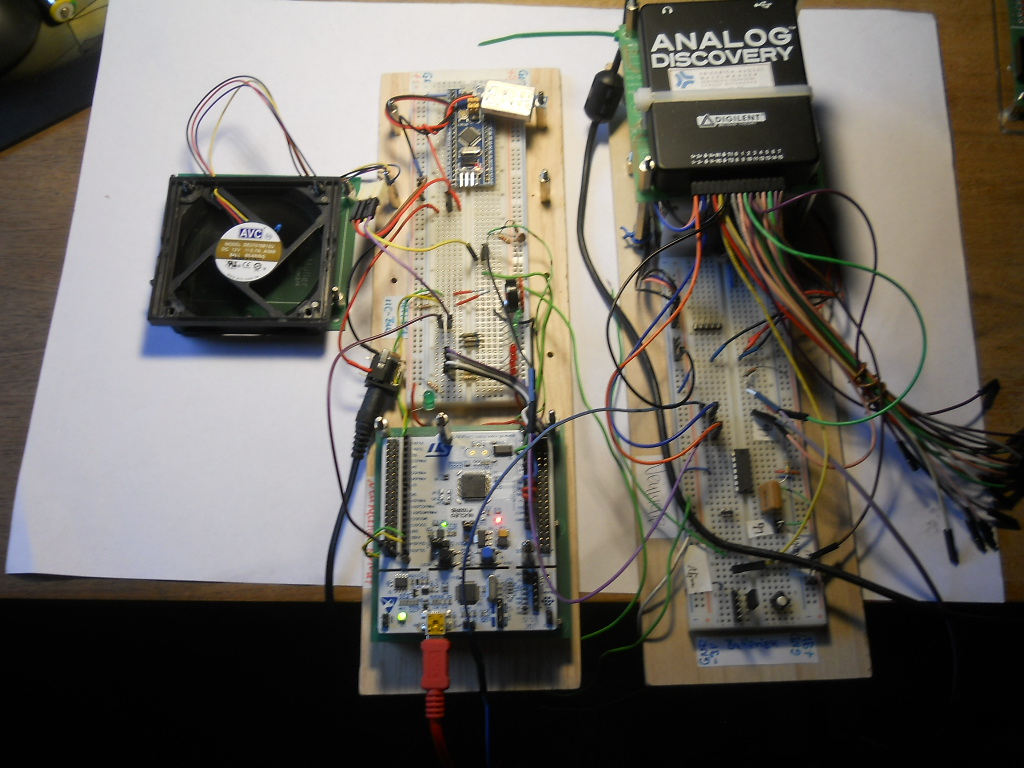
Versuchsaufbau mit einem µC ARM Nucleo, der einen Lüfter temperatur- und drehzahlgeregelt ansteuert. Das PWM Signal vom µC wird über ein USB-Oszilloskop „Analog-Discovery“ erfasst.
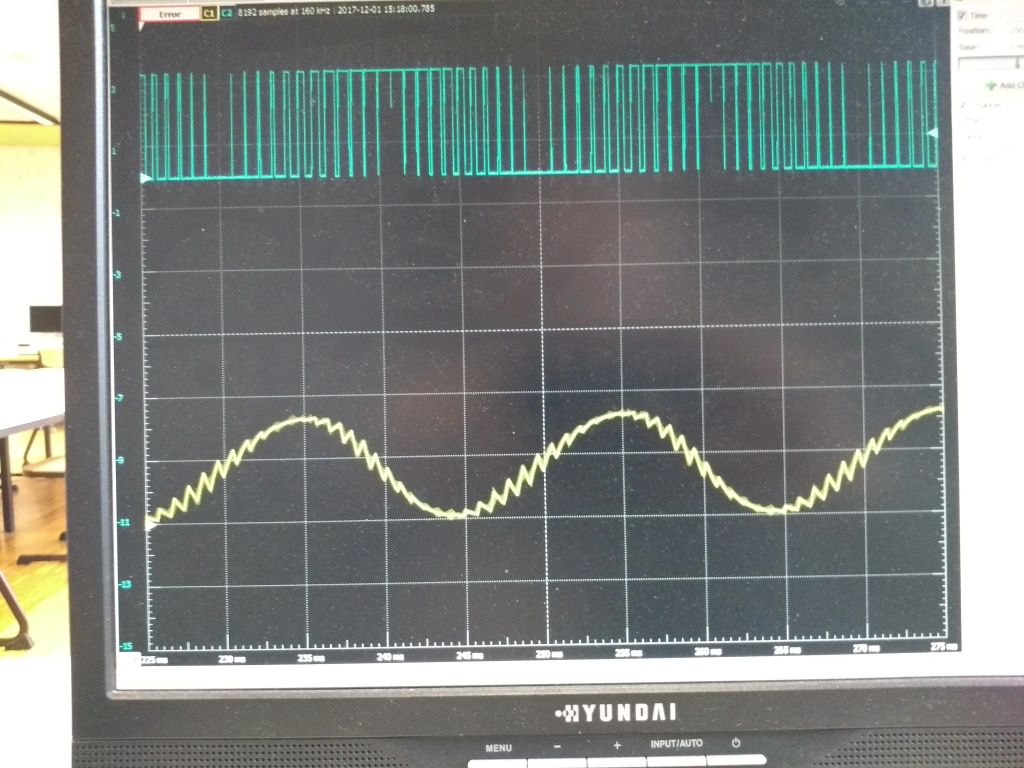
Messung mit dem Oszilloskop
Oben ein PWM Signal
Unten der Strom, wenn man das Signal auf eine Induktivität (Spule) gibt. Somit kann mit einem PWM Signal elektronisch ein Sinussignal für einen Motor erzeugt werden. Das ist die Grundlage für die moderne Antriebstechnik, z.B. in E-Autos
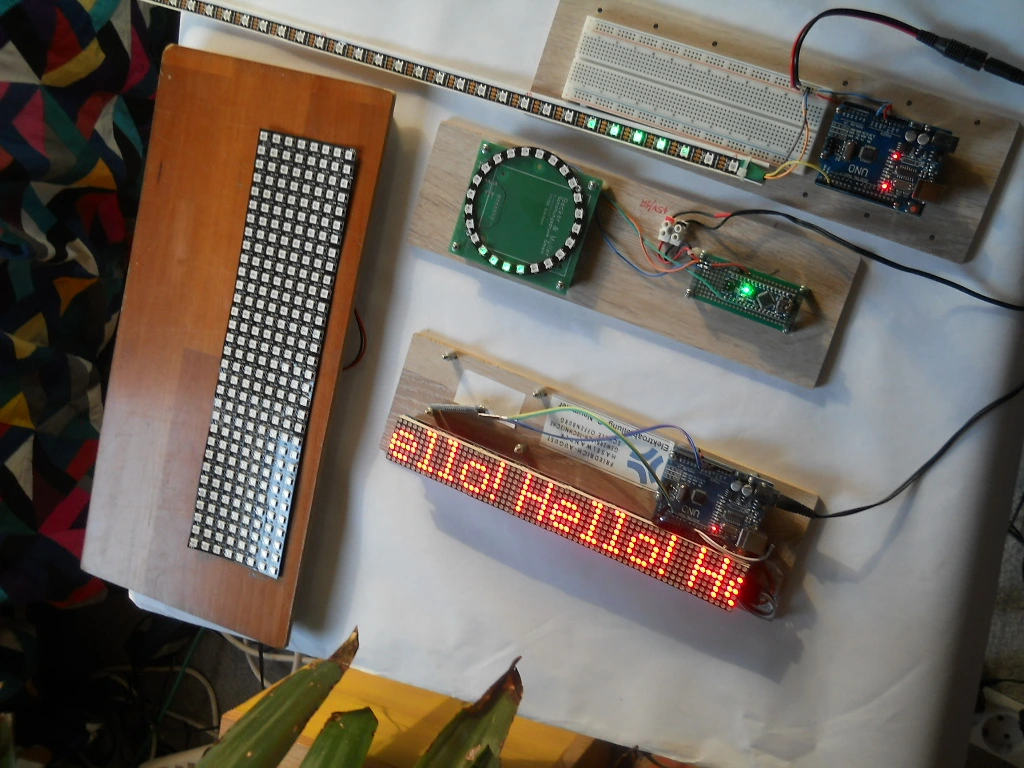
Anwendungen mit LEDs
Die Anzeige Hello wird mit 8x (8×8) = 256 LEDs realisiert. Der µC, hier ein Arduino UNO, steuert die Anzeige über den SPI-Bus. Der Text wird über Bluetooth von einem Smartphone empfangen.
Darüber und links daneben sind RGB-LEDs zu sehen, die über eine serielle Busleitung angesteuert werden. Die RGB (Red-Green-Blue) LEDs können in jeder beliebigen Farbe leuchten. Eine spannende Programmieraufgabe ohne viel Hardwareaufwand.
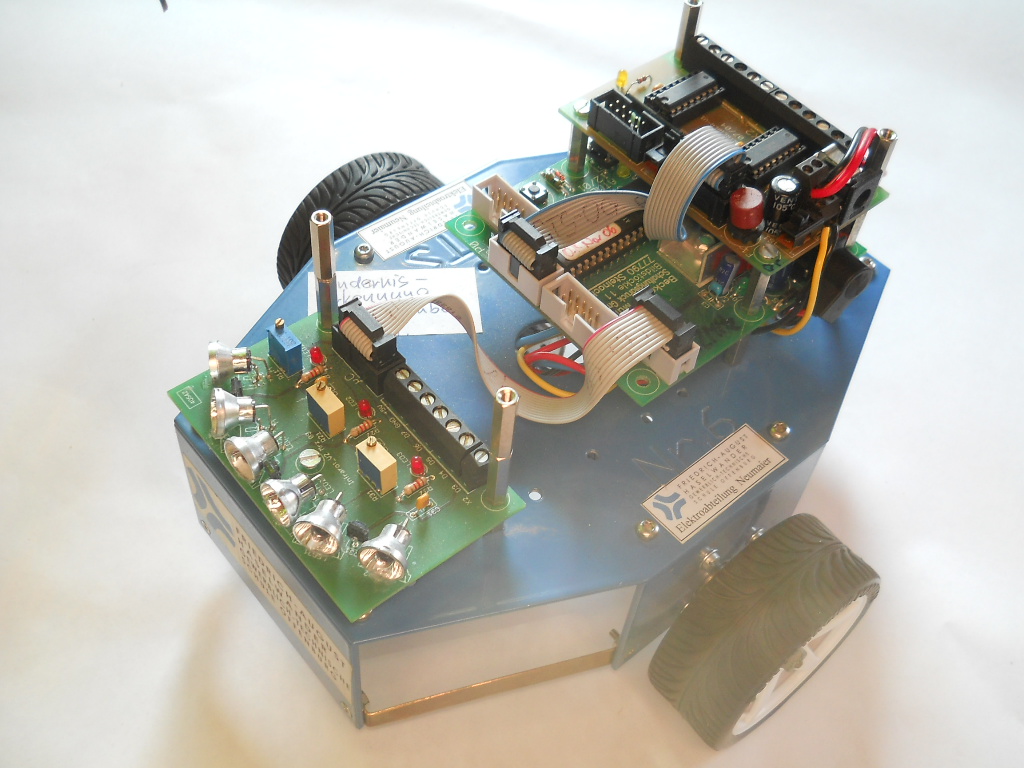
Der Klassiker für jeden Elektroniker: Der mobile Roboter.
Zu sehen sind selbst entwickelte Platinen zur Hinderniserkennung, H-Brücken zur Motoransteuerung und die µController-Platine, hier ein 8051erSystem.





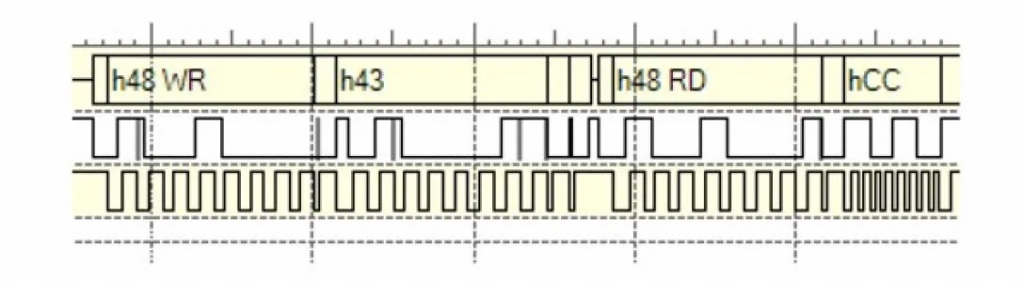
Messungen an Bussystemen mit einem Logik-Analyser:


Messungen an der seriellen Schnittstelle mit Oszilloskop und mit dem Logic-Analyser