Geräte und Systeme in Stand halten ->Schaltungsanalyse auf Baugruppen- und Bauelementebene. führen Wartungs- und Inspektionsmaßnahmen an Geräten und Systemen durch. protokollieren Fehlfunktionen. Sie planen die systematische Fehlersuche. Sie wählen geeignete Prüfalgorithmen, wenden in allen Reparaturschritten die sicherheitstechnischen Schutz- und Prüfvorschriften an und erstellen Prüfprotokolle.
Überprüfung einer elektronischen Schaltung mit automatisierter Messtechnik
Das kann man realisieren z.B. mit
Verwendung einer Messbox (z.B: Labjack) und eine Auswertungssoftware z.B.
Profilab
Einfacher Fall: Überprüfung eines Sensorwertes, hier eine Temperatur, auf zu niedrig, richtig, zu hoch:

Ein weiteres Beispiel zur Erfassung eines Füllstandsensors:

oder LabView zum automatisiertem Testen von Platinen
In Lernfeld 11 wird auf ein Projekt eingegangen, wo eine Messbox entwickelt wird mit einem Arduino µController. Das entspricht einer Erweiterung dieser Unterrichtsinhalte.
Einparkhilfe mit µC umgesetzt
Das Lernortkooperationsprojekt (Was für ein Wort…) Einparkhilfe aus dem 2. Ausbildungsjahr kann hier nochmals aufgegriffen werden. Allerdings nutzen wir nun die programmierbare Elektronik, sprich µC.
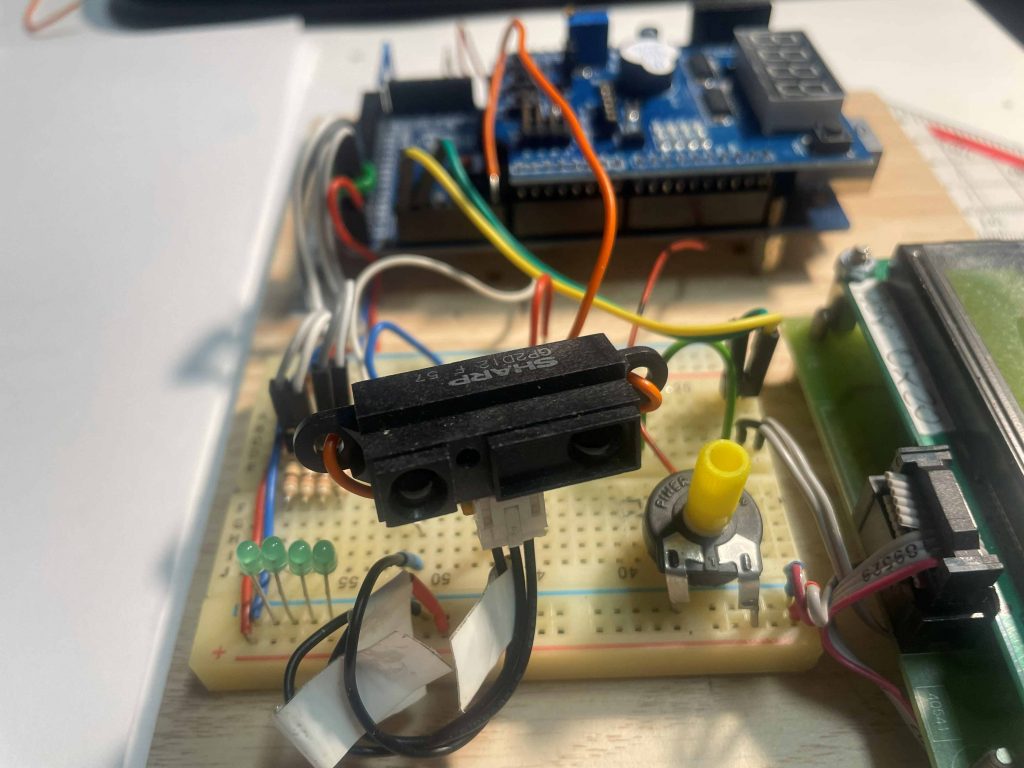
Der verwendete Sensor soll zuerst einmal der gleiche sein. Es ist der SHARP GP2D12 10 – 80 cm) siehe Pflichtenheft , der eine analoge Spannung entsprechend dem Abstand liefert. Die Anzeigeelemente können vielseitig gewählt werden, sei es optische oder akustische Signale, natürlich auch Anzeigeelemente wie LC-Display, 7Seg. Anzeige, LED Band.
Entsprechend sieht das Pflichtenheft aus:
Umsetzungshilfen:
Der SHARP Sensor auf einem kleinen Entwicklungsbord mit Multi-Funktion-Shield (ca. 3 bis 5€) und Arduino MEGA Controller mit kleinem Steckboard und IIC-LC Display.
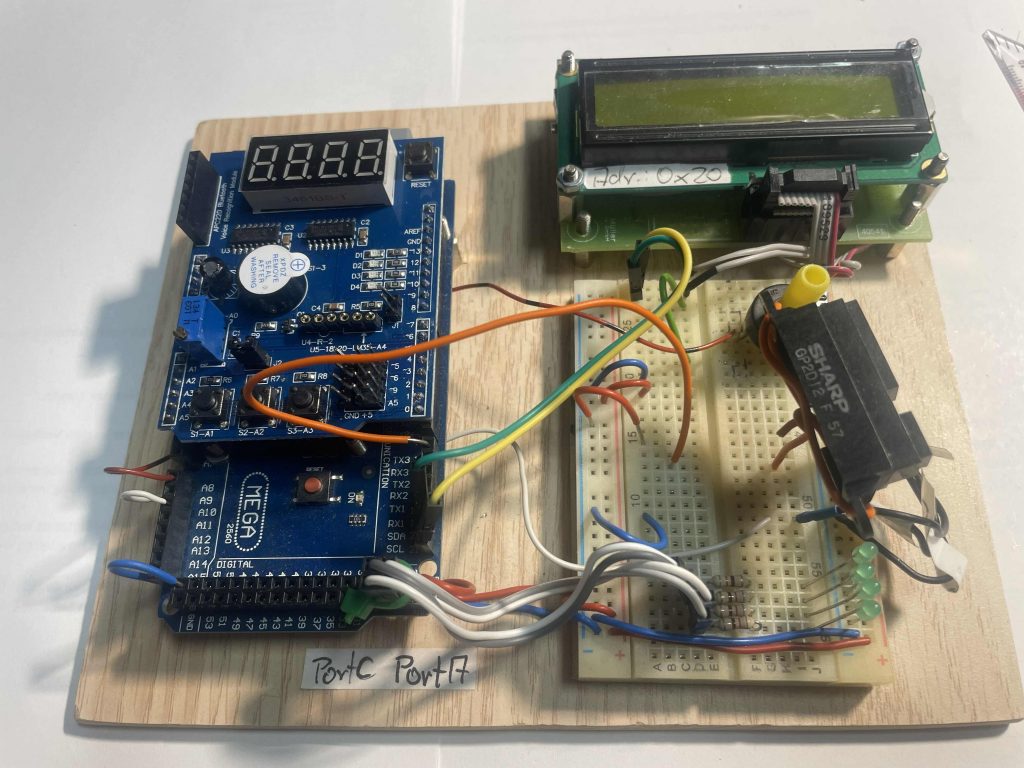
Hier ein Einstieg in die Erfassung des Messwertes mit einer gemultiplexten 7 Seg Anzeige auf dem MF-shield:
———————————————————–
Regelungstechnik
Die Umsetzung und Vertiefung dieses interessanten Themas erfolgt mit Simulationssoftware.
Siehe auch den Link im Menue „Simulation“
1. Multisim und MultisimLife(im Browser) Multism National Instruments
2. Winfact mit dem Modul BORIS Winfact Ingenieurbüro Dr.Kahlert
PPT Regelungstechnik mit Winfact:
Grundlagen Regelungstechnik Übersicht über Blocksymbole und Dimensionierung
Ein Skript zum Thema Steuern und Regeln über 62 Seiten. Viele Steuerungsaufgaben und Lösung mit einer SPS LOGO Gegen Ende auch das Thema Regelungstechnik mit den bekannten Reglern